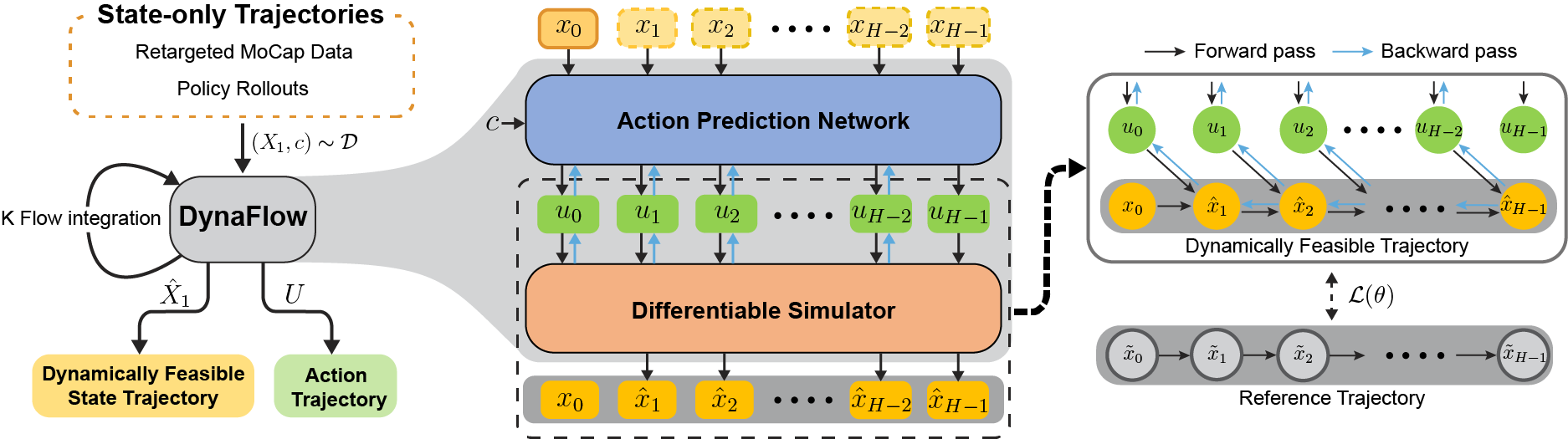
Overview of DynaFlow.
This paper introduces DynaFlow, a novel framework that embeds a differentiable simulator directly into a flow matching model. By generating trajectories in the action space and mapping them to dynamically feasible state trajectories via the simulator, DynaFlow ensures all outputs are physically consistent by construction. This end-to-end differentiable architecture enables training on state-only demonstrations, allowing the model to simultaneously generate physically consistent state trajectories while inferring the underlying action sequences required to produce them. We demonstrate the effectiveness of our approach through quantitative evaluations and showcase its real-world applicability by deploying the generated actions onto a physical Go1 quadruped robot. The robot successfully reproduces diverse gait present in the dataset, executes long-horizon motions in open-loop control and translates infeasible kinematic demonstrations into dynamically executable, stylistic behaviors. These hardware experiments validate that DynaFlow produces deployable, highly effective motions on real-world hardware from state-only demonstrations, effectively bridging the gap between kinematic data and real-world execution.
Overview of DynaFlow.
Bringing raw motion data to the real world involves three key challenges: the embodiment gap, the state-to-action gap, and the sim-to-real gap. To address the state-to-action gap, conventional approaches often train separate expert policies for individual motions and distill them into a single generative policy. While effective, this multi-stage pipeline requires substantial engineering effort and careful tuning.
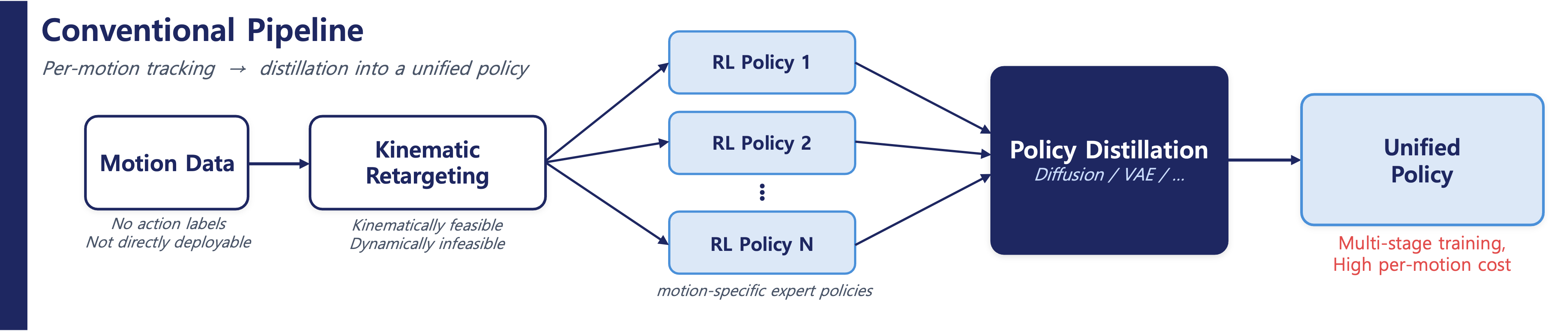
DynaFlow simplifies this process by embedding a differentiable simulator directly into the flow matching process, optimizing actions to match a target probability flow in the state space. Through this tight integration, our approach effectively bridges the state-to-action gap within a single, unified generative framework.

MoCap retargeting is dynamically infeasible, exhibiting foot penetration and excessive oscillations.
DynaFlow generates physically consistent trajectories while preserving stylistic essence.
The generated motions are directly deployable on real-world hardware, bridging the state-action gap.
DynaFlow scales across diverse robotic embodiments.
DynaFlow generates deployable motions for diverse real-world scenarios.
@article{lee2025dynaflow,
title={DynaFlow: Dynamics-embedded Flow Matching for Physically Consistent Motion Generation from State-only Demonstrations},
author={Lee, Sowoo and Kang, Dongyun and Park, Jaehyun and Park, Hae-Won},
journal={arXiv preprint arXiv:2509.19804},
year={2025}
}